Eloksal Kaplama Tesisi Vinçleri
Eloksal Kaplama Tesisi Vinçleri (Elkavis) Avantajları
- Kasıntısız kaldırma, dik indirme ve kaldırma işlemi,
- Düşük sürtünme ve kılavuzlama sistemi,
- Enkoder kontrolü ile noktasal kontrol imkânı,
- Otomasyon için kolay enkoder takma özelliği,
- Emniyetli vinç sistemi,
- Yüksek kaldırma hızı, invertörlü değişken hız kontrolü alt/üst çift emniyet sivici,
- Kılavuzlama ile salınım giderme mekanizması,
- Makaralı kılavuzlama, kolay bakım ve değişim imkânı,
- Kolay bakım ve kontrol sistemi,
- Kumanda panosuna kolay erişim,
- Kolay kullanım,
- İki noktadan emniyetli H bara kaldırma,
- Mamul üretim verimliliği,
- Üretim artışı,
- Elemandan tasarruf,
- Özel halat/zincir donamı 2×2/1 veya 2×1/1 donam, yük düşme emniyet kontrolü,
- İş güvenliği,
- Uzun ömür,
- Asit buharından korunma yöntemleri,
- Kazanların montajındaki hataları giderme özelliği,
- Değişken hızlı yüksek hızlı köprü yürüme hareketi,
- Tam otomatik sistem kullanımı,
- Eloksal süreç kontrolü,
Elkavis Vinçleri Alternatifleri
Manuel
Tüm kontroller kumanda butonu vasıtası ile operatör tarafından yapılır. Her vinç bir operatör ile kontrol edilir.
Yarı Otomatik
Sistem otomatik çalışmaya uygundur. İstasyonlar arası geçişler operatör kontrolü ile yapılır. Kazanlarda bekleme ve daldırma süreleri otomatiktir. Gerektiğinde otomatik çalışma ancak arıza anında dışarıdan operatörler ile müdahale, kazanlar arası geçişler operatör tarafından yapılmaktadır.
Tam Otomatik
Tüm süreç skada ekranından kontrol edilmektedir. Vinçlerin başında operatöre gerek yoktur. Tüm kazan kimyasal kontrolleri otomatik olarak skada ekranından yapılmaktadır. İstasyonlar arası geçişler boşaltma istasyonlarına geçişler otomatik yapılmaktadır. Uzaktan erişim ile kolay bakım ve müdahele imkânı vardır.
Kaldırma tahriki zincir dişli sistemi ile olup aynı eloksal sisteminde bulunan kılavuzlama rayına makaralar ile yataklanmıştır. Kasıntı yapmadan kaldırma ve indirme işlemi gerçekleştirilmektedir. Asansör yükseklikleri H bara yüksekliğinden bir miktar fazla olmalıdır.
İki asansörün arasına elemanların rahat çalışabilmesi için bir çukur açılır. H bara bu çukura indirilerek üzerinde malzemeler boşaltılır ya da monte edilir. Asansör sistemleri otomasyona dâhil edilmezler.

Eloksal işleminden çıkmış mamul malzemelerin yükleme boşaltma holüne, yükleme boşaltma holünde hazırlanan ham mamullerin eloksal kaplama holüne getirilmesini sağlayan araba sistemidir.
Arabanın yürüyeceği raylar eloksal ve boşaltma holler dikine keser. Arabanın yüksekliği H baraya bağlı mamullerin yere değmesini engelleyecek yükseklikte olmalıdır. Arabanın boyu ise H baranın boyundan büyük olmalıdır.
Arabanın tahrik sistemi göbekten tahrikli olup 2 adet motorla olacaktır. İnvertör kontrollü olup değişken hıza sahiptir.
Elektrik besleme sistemi kapalı bara ya da kablo sarma tamburu ile yapılmaktadır. Otomatik sistemlerde transfer arabasının hareketleri de otomasyona dâhil edilir.

Asansör sistemi yükleme boşaltma holünde olup eloksal holünden gelen bitmiş mamullerin boşaltılmasına, sevkiyata gönderilmesine ayrıca eloksal holüne gidecek malzemelerin hazırlanmasına yardımcı olan makinalardır.
Karşılıklı birer adet kaldırma grupları karşılıklı olarak senkron ve asenkron çalışmalıdır.
H baralar kaldırma kollarına bağlı şapkalar üzerine konarak aşağı yukarı hareket ettirilir. İki kaldırma grubunun ara mesafesi H bara uzunluğundan biraz büyük olmalıdır.
Pano herhangi bir kaldırma grubunun bulunduğu şase üzerine monte edilir, ulaşımı ve kontrolü kolaydır.

Köprü tekerlek tahrikleri otomatik/yarı otomatik veya manuel sistemlerde hep aynıdır. Tekerlekler göbekten tahrik edilir.
Otomatik kontrol sistemlerinde konum belirleme söz konusu olduğundan hol boyunca zincir gerilir. Bunun üzerine bağlanır. Enkoder köprüden indirilen plakalara yataklanır ve eksen bozulmaz.
Tekerlek patinaj yapsa, tekerlek ray üzerinde hareket etse dahi enkoderden alınan değerlerde değişiklik olmaz.
Otomatik çalışma koşullarında kazan konumlarını sağlıklı yapabilmek için vinç yürüme yolları üzerine mekanik siviçler konmaktadır.
Motor tahrikleri invertör kanalıyla olup değişken hızlara sahiptir.

Kaldırma grupları iki adet olup vinç başlık kirişlerine yakın monte edilir. Bakım için kaldırma grupları etrafına platformlar konur.
Doğrudan kimyasal buharından etkilenme olmaz. Pano üzerinde bulunmadığından dolayı buhardan etkilenme söz konusu değildir.
Taşıyıcı kılavuz ayaklar vinç köprüsü üzerine cıvatalar ile bağlanır.
İki kaldırma grubu tek kumandadan kontrol edilir. İkiz tamburlu kaldırma grubu ile dik kaldırma indirme özelliği 2×2/1 halat donam ya da zincir tahrik sistemi ile 2×1/1 donam. Yüksek kaldırma hızına erişim/değişken hız kontrolü invertör kontrolü.
Birbirinden bağımsız halat donamı, tek halat kopsa dahi mamullerin kazanlara düşme riski yoktur. Taşıma kapasitesinin 5 katı halat/zincir emniyet katsayısı kabulü yapılmaktadır. Sessiz ve darbesiz kaldırma indirme işlemi ürün kalitesini arttırmaktadır. Otomasyon için tambur/zincir dişli çıkışına enkoder takma ön hazırlık mevcuttur. Makine grubuna kolay erişim kolaylığı ve müdahale

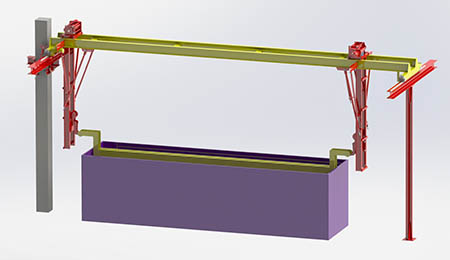
Kılavuzlama grupları, H bara’nın (Eloksal olacak alüminyum profillerin asıldığı travers) kazanlardan çıkarılıp daldırılmasını sağlıklı bir şekilde yapılmasında kolaylık sağlar.
Kaldırma grubunun altına rigit bir şekilde bağlanır. Sağa sola ve ileri geri hareketleri engellemek için çaprazlar köprüye cıvatalar ile bağlanır. Kılavuzlama profilleri standart H ya da IPE profillerden olup üzerinde makara çalışmaya müsaittirler.
Kaldırma gruplarından inen iki adet halat kılavuzlama profilleri üzerinde aşağı yukarı hareket eden kolların bağlı olduğu arabaya iki noktadan bağlıdır.
Taşıyıcı arabada kılavuz profiller üzerinde kolayca hareket edebilmesini sağlayan 12 adet poliamid makara mevcuttur. Makaralar rulmanlı olup sürtünmeyi en aza indirger. Makaraların kolay montaj ve demontaj yapılması bakım işlemini kolaylaştırır. Cıvataları sökmek vasıtası ile arızalı makaralar hızlıca değiştirilir.
Makaralar, kılavuz profillere köprü ekseni ve hol boyunca ±2 mm toleransla monte edilir. Bunun sayesinde kaldırma ve indirme esnasında, hol boyu hareket esnasında H bara salınım yapmadan istasyon değiştirir. H bara kazanlara daldırma ve çıkartma yaparken sağa sola çarpması engellenir.
Kılavuz profiller kazanlardaki paralellik bozukluklarını çaprazlar vasıtası ile alır. Bu ayarlar vasıtası ile tutucu kollar H baraları tüm kazanlarda aynı ölçüleri alması sağlanır. Kılavuz profillerin üzerinde iki adet üst, iki adet altta olmak üzere dört adet sınır siviçleri vardır. H baraların kolayca yakalayabilmek için kollar çiftli yapılmaktadır. Kol yüzeyleri genişletilerek H baraların emniyetli taşınması sağlanır.
Kolların arkasına bağlanan yaylar vasıtası ile eğimli kaldırma gerçekleştirilir, sistem düzleştiğinde kollar yine eski yerlerine gelirler.



